MecaSequentialGappyMetaModel
This use case aims to validate the methodology POD + ECM for quasistatic elastoviscoplastic computations with Z-set, with a reconstruction of the dual quantities using a meta model, see Section Publications, articles 1 and 8.
Optional prerequisite: Zmat.
The data needed to execute the tutorials below can be loaded here: exampleMecaSequentialGappyMetaModel.zip
Features: replace the gappy-POD with the default meta-model
The physical setting, workflow and reduction strategy are almost the same as in the tutorial MecaSequential , hence we only point out the differences here, namely the use of a meta model to replace the gappy POD in the reconstruction of dual quantities.
Consider the dual quantity accumulated plasticity \(p\). The first step is identical to the Gappy-POD, namely computing a reduced-order basis \(p_i\) for this quantity. Then, the high-fidelity snapshots of \(p\) are projected onto this POD basis to compute the reduced coordinates:
Then, a meta model, in the form of a scikit-learn regressor, is trained to approximate the following function:
where \(\hat{x}_j\) are the reduced quadrature points selected by the ECM algorithm.
In the online stage, the accumulated plasticity \(p\) is already computed at the reduced integration points \(\hat{x}_j\) to construct the reduced problem, and the trained regressor is used to evaluate the reduced coordinates of this dual quantity.
Mechanical.CompressOperator(collectionProblemData, operatorPreCompressionData, \
mesh, 1.e-5, listNameDualVarOutput = dualNames, \
listNameDualVarGappyIndicesforECM = ["evrcum"],\
methodDualReconstruction = "MetaModel",\
timeSequenceForDualReconstruction = outputTimeSequence[1:])
When calling the CompressOperator function, two attributes are added, with respect to the tutorial MecaSequential :
methodDualReconstruction = "MetaModel", by default scikit-learn’s lasso with alpha`=0.1, `max_iter`=1e8, `tol`=1e-5. Other meta models can be used, see for instance tutoriel :ref:`MecaSequentialGappyBiaisMetaModel2.timeSequenceForDualReconstruction: to specify the time step where the meta model is trained.
Results
In Fig. 12, the quality of the reduced model is illustrated by comparing it to the high-fidelity reference.
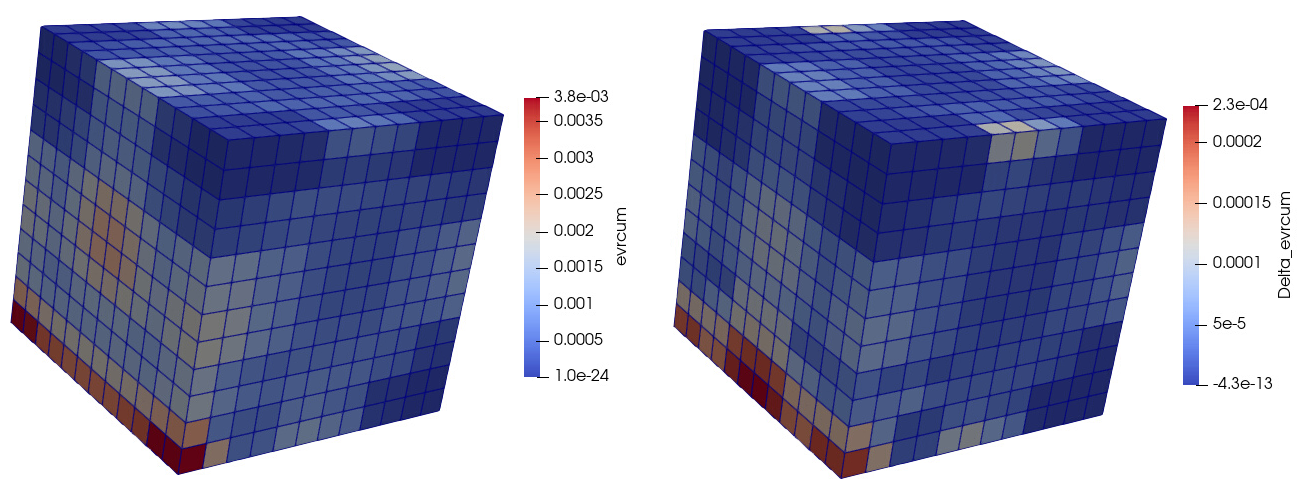
Fig. 12 Illustration of the ROM accuracy on the accumulated plasticity p (left) HFM, (right) pointwise difference between the ROM and the HFM.